Implementation of Standard And Advanced Path Planning Algorithms
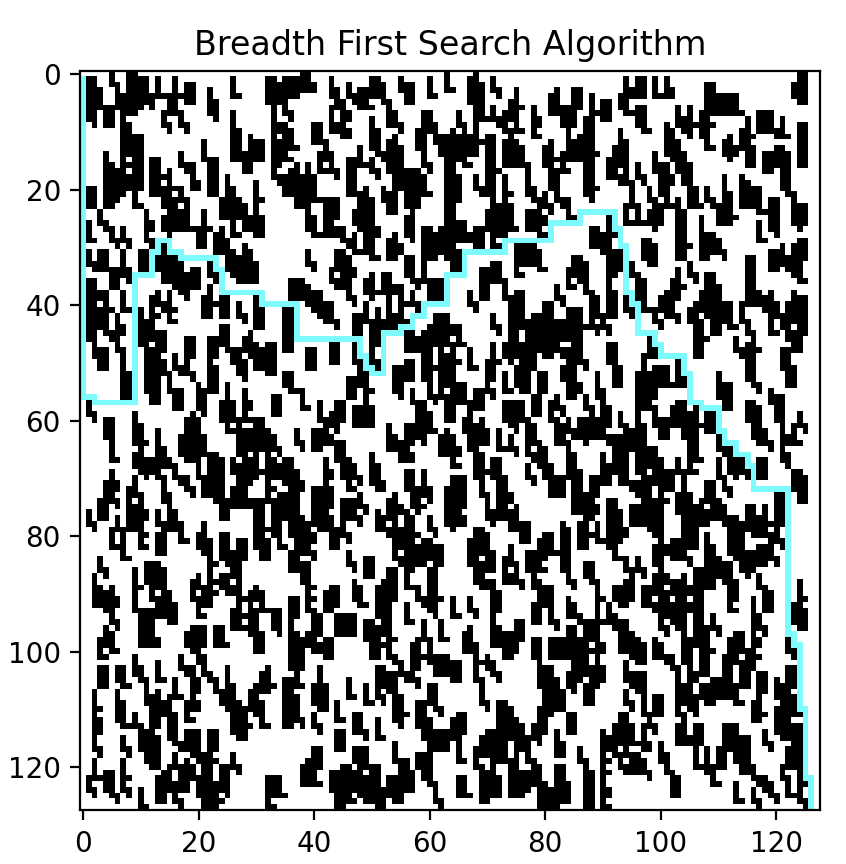
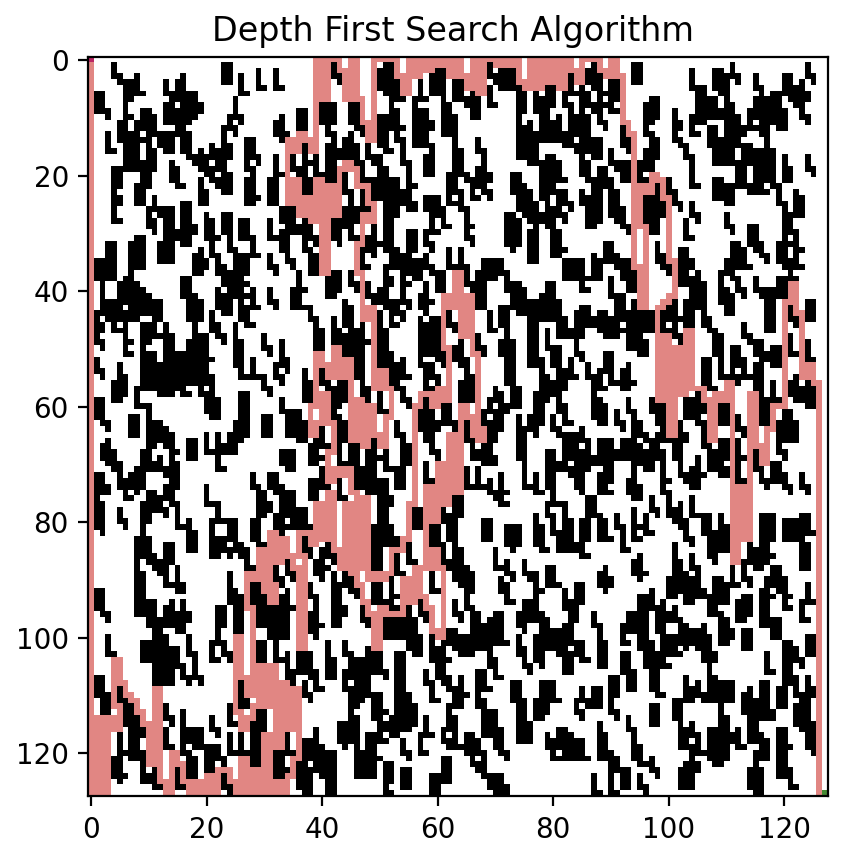
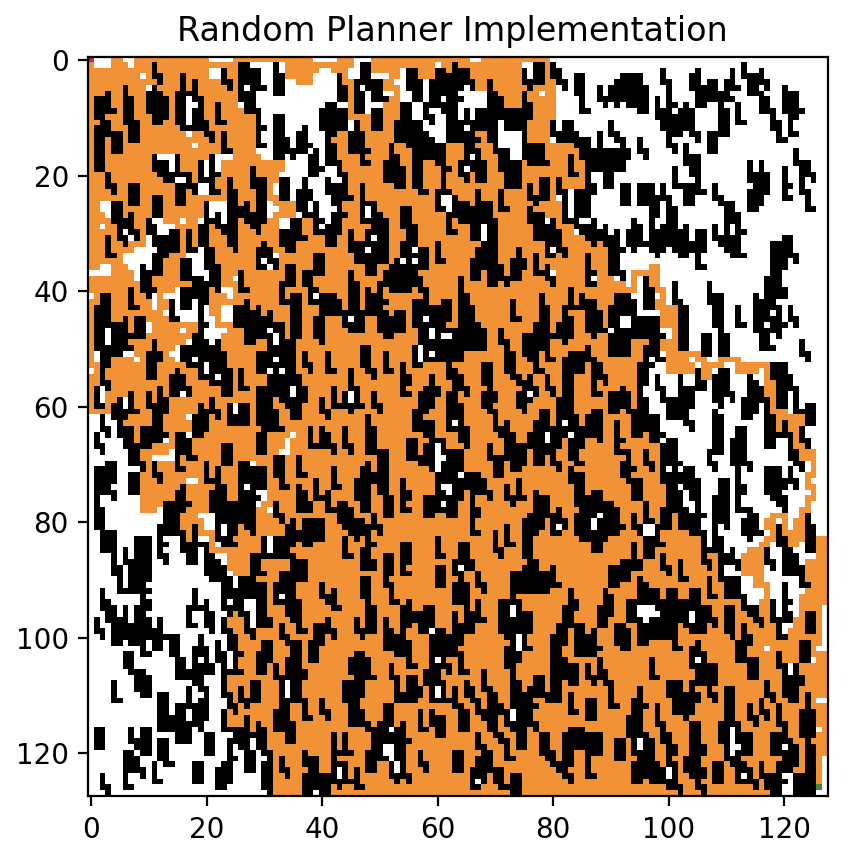
Implemented BFS, DFS, Dijkstra and A* Algorithms to find paths from start to goal in dynamically generated maps.
Generated maps dynamically with varying obstacle densities to test and validate pathfinding algorithms