Visual Fusion
Calibrated camera by mapping 3D world coordinates to image coordinates.
Estimated camera parameters through the processes of calculating intrinsic and extrinsic parameters.
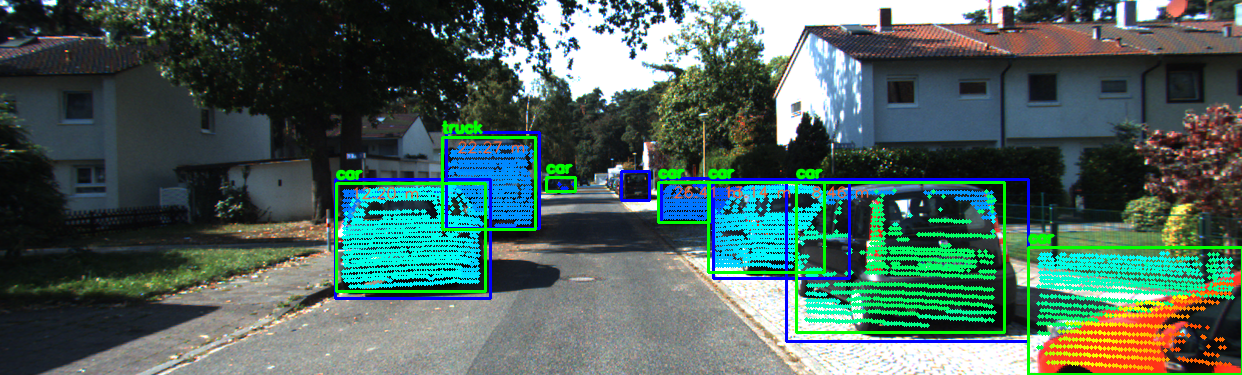
Implemented low-level (Point-Pixel) fusion and mid-level (Box to Box) fusion of LiDAR 3D points with 2D image detections using pretrained YOLOv4 network.