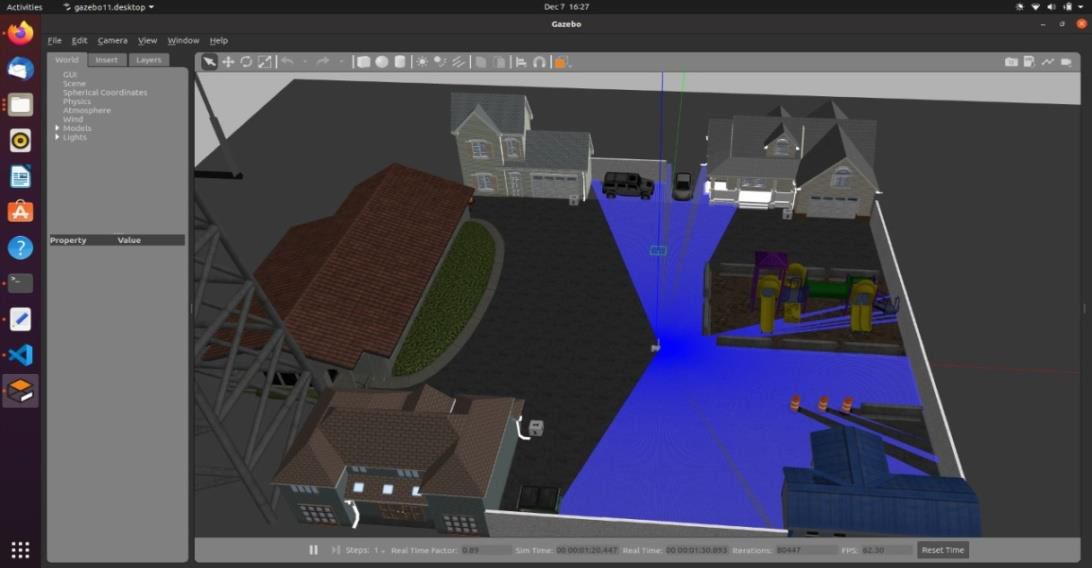
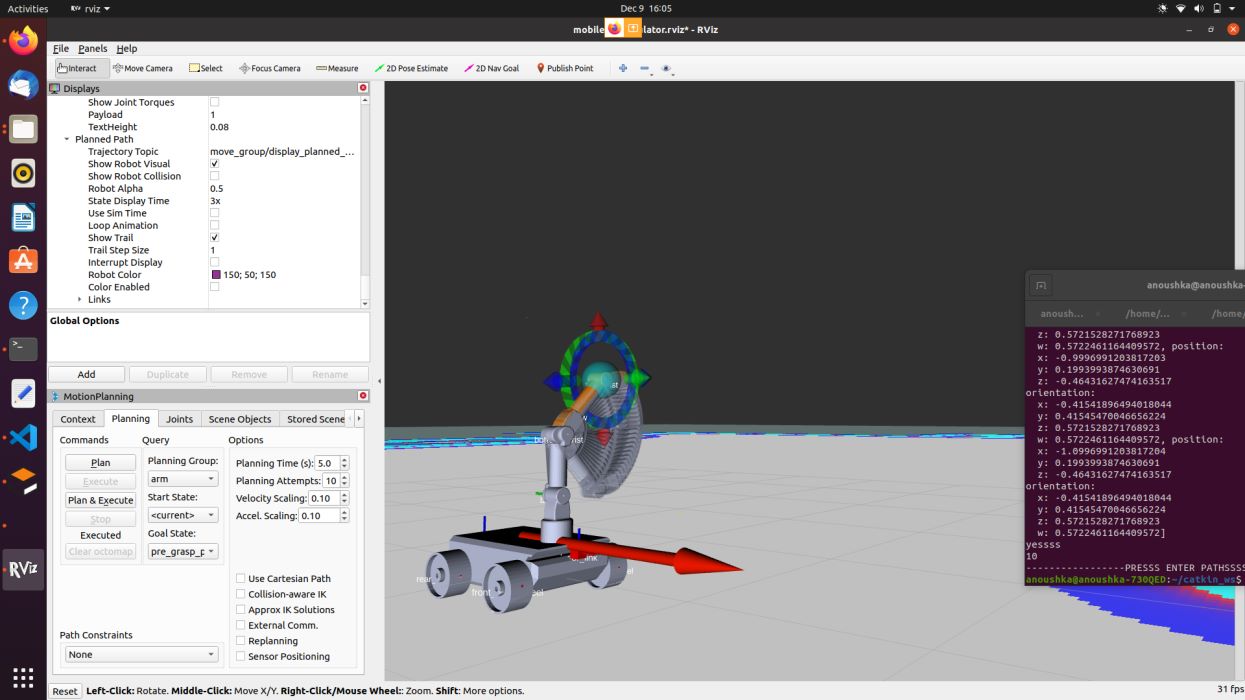
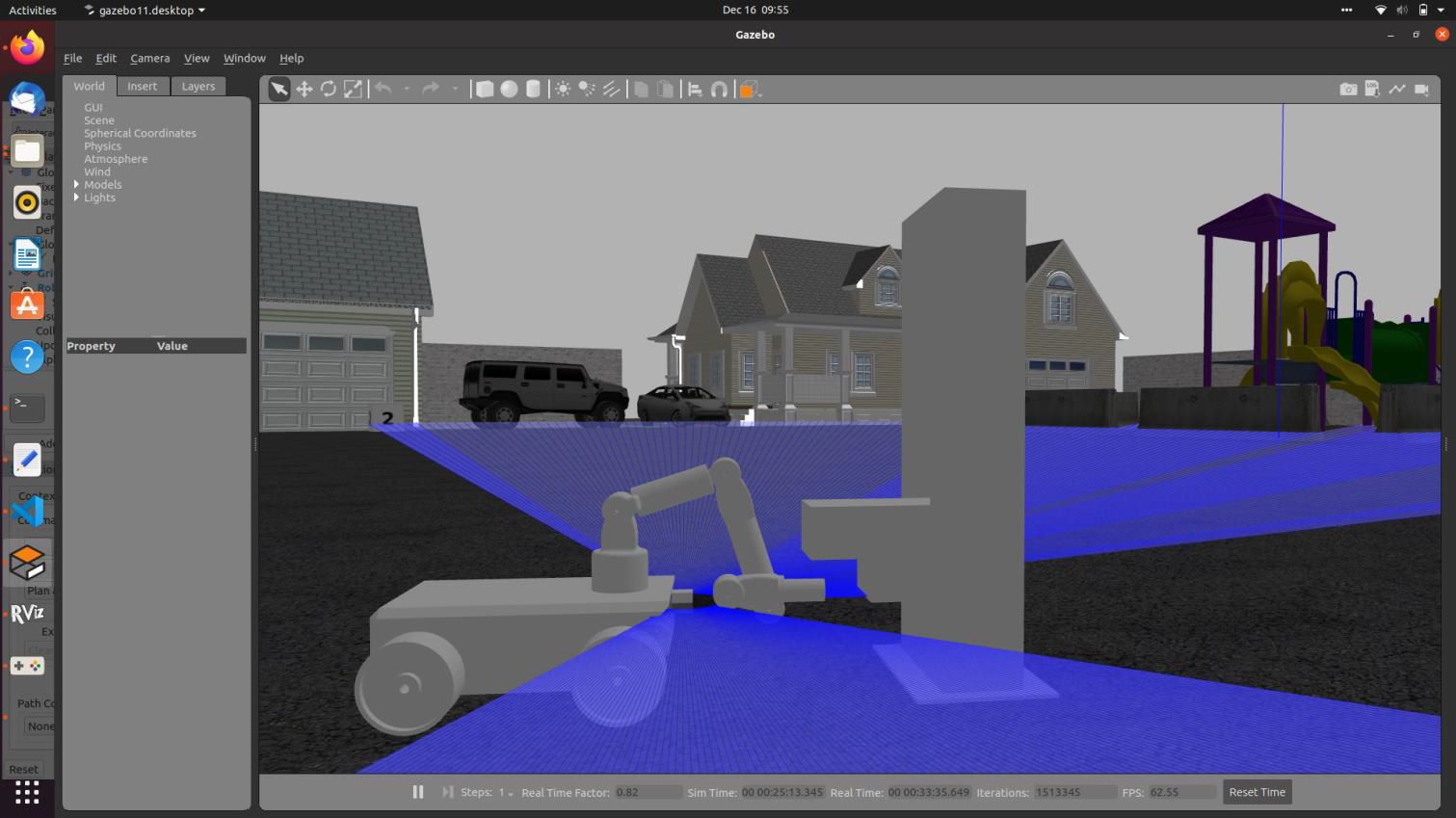
Mobile Robot Navigation and Manipulation
Simulated an autonomous mobile robot utilizing perception stack for complex environment navigation.
Executed sensor integration (LIDAR), environment mapping, localization, and autonomous motion planning