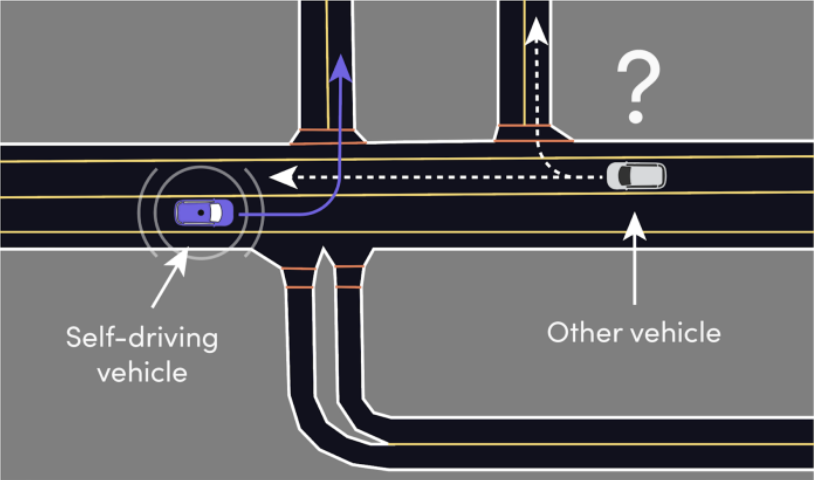
Agent Vehicle Motion Prediction
Developed a deep learning framework for predicting future trajectories of agents in real-world environments.
Leveraged Birds Eye View (BEV) images and past trajectories to enhance prediction accuracy.
Integrated ResNet-50 with a sequence-to-sequence model, achieving a 15% increase in prediction accuracy.