Vision Based Grasping
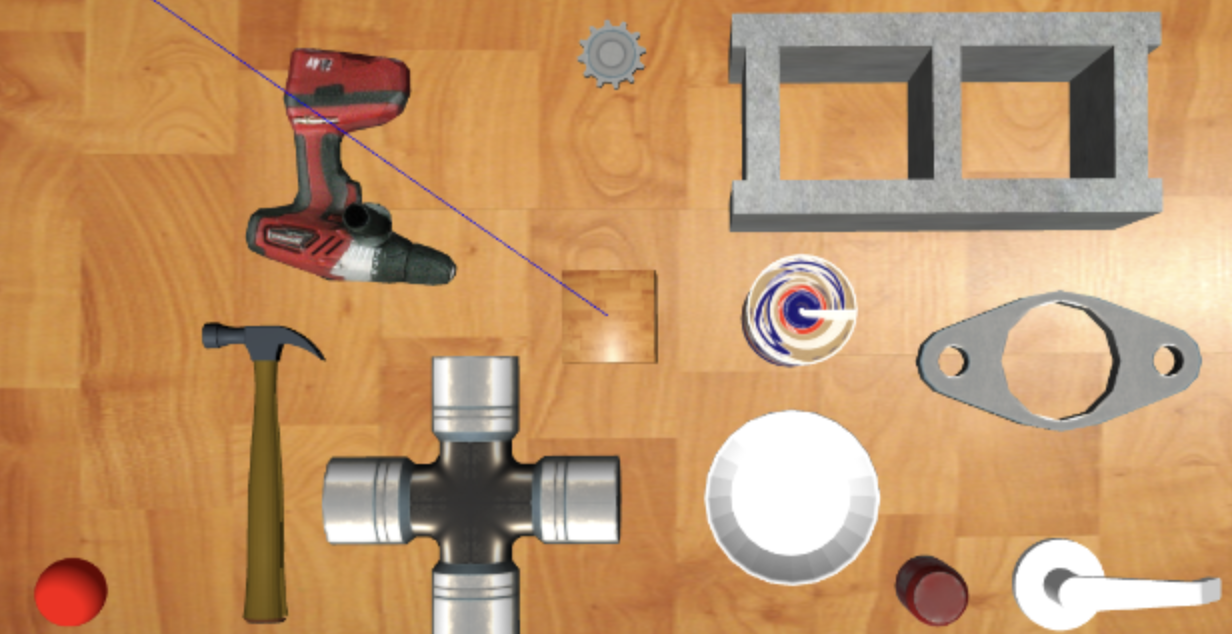
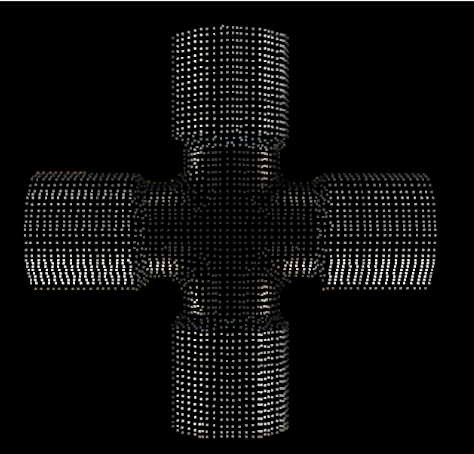
Deployed a RealSense depth camera in Gazebo to simulate a table setting, converting images to point clouds.
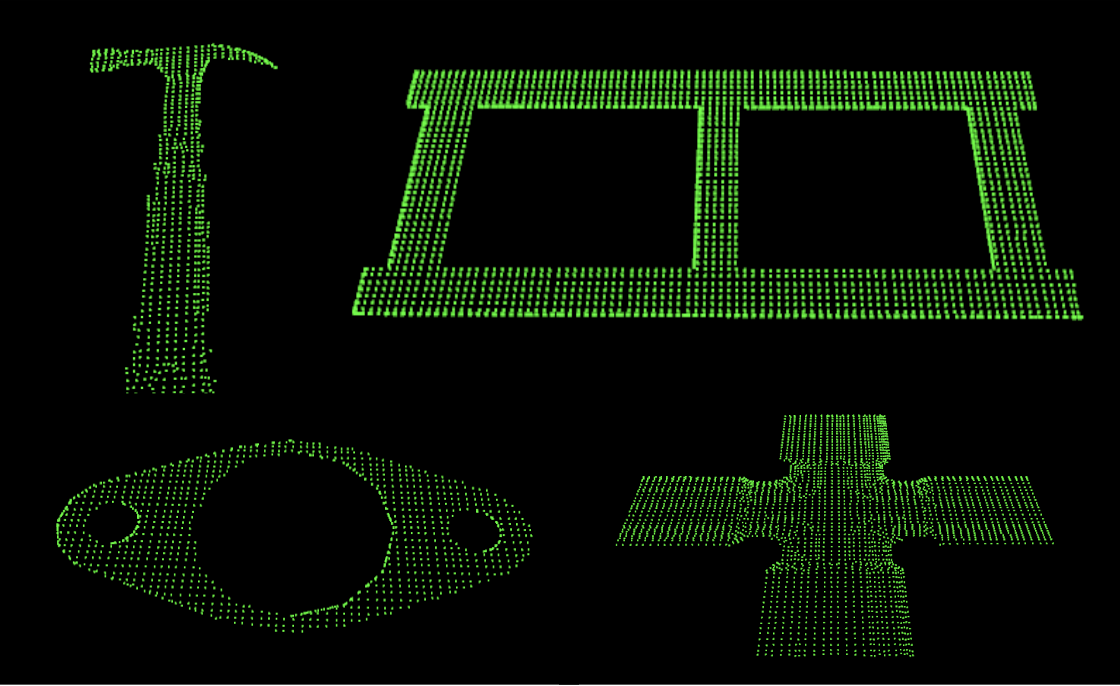
Engineered a CV algorithm for segmenting objects from point cloud data by extracting depth information.
Researched and enhanced grasp synthesis and stability by 20% through heuristic and geometric optimizations.